
최근 인공지능 연구에서 확률적 중립 신경망이라는 개념이 점점 더 주목받고 있어. 특히 복잡하고 예측 불가능한 환경에서도 안정적으로 작동하는 시스템을 설계하려면, 시간 지연과 외란을 고려한 신경망 설계가 필수적이야. 오늘 소개할 논문은 바로 이러한 환경에서 확률적 중립 신경망이 안정적으로 동작할 수 있는 조건을 제시한 연구야.
이 글에서는 확률적 중립 신경망의 개념부터, 수학적 안정성 분석, 실제 예제, 그리고 실무에서 어떻게 활용할 수 있는지까지 친근하고 상세하게 풀어줄게. 논문 내용이지만 이해하기 쉽게 설명했으니, 끝까지 읽으면 전문가처럼 느껴질 거야!
1. 확률적 중립 신경망이란 무엇인가?
일반 신경망 vs. 중립 신경망
일반적인 신경망은 입력과 출력 간의 관계만을 고려해. 하지만 현실 세계는 그렇게 단순하지 않아. 예를 들어 로봇 제어 시스템을 생각해봐. 단순히 현재의 입력만이 아니라, 이전 입력의 변화량(= 미분값)이 결과에 영향을 줄 수도 있어.
이런 경우를 모델링하기 위해 중립 신경망(neutral neural network)이 등장했어. 중립 시스템은 단순한 지연 시스템과 달리, 지연된 상태뿐 아니라 지연된 상태의 변화까지 고려해.
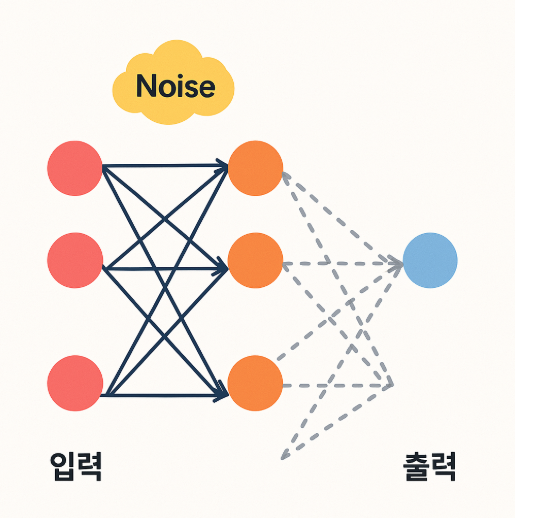
즉, 중립 신경망은 아래처럼 생긴 구조를 갖지
“d[x(t) – Dx(t – h(t))] = {…} dt + {…} dω(t)
”
이 식에서 보이듯이, 과거 상태의 변화율도 현재 상태에 영향을 미치게 돼. 여기에 확률적 요소(노이즈)까지 들어가면, 그게 바로 우리가 말하는 확률적 중립 신경망이야.
2. 시간 지연(delay)의 정체와 영향
세 가지 지연의 종류
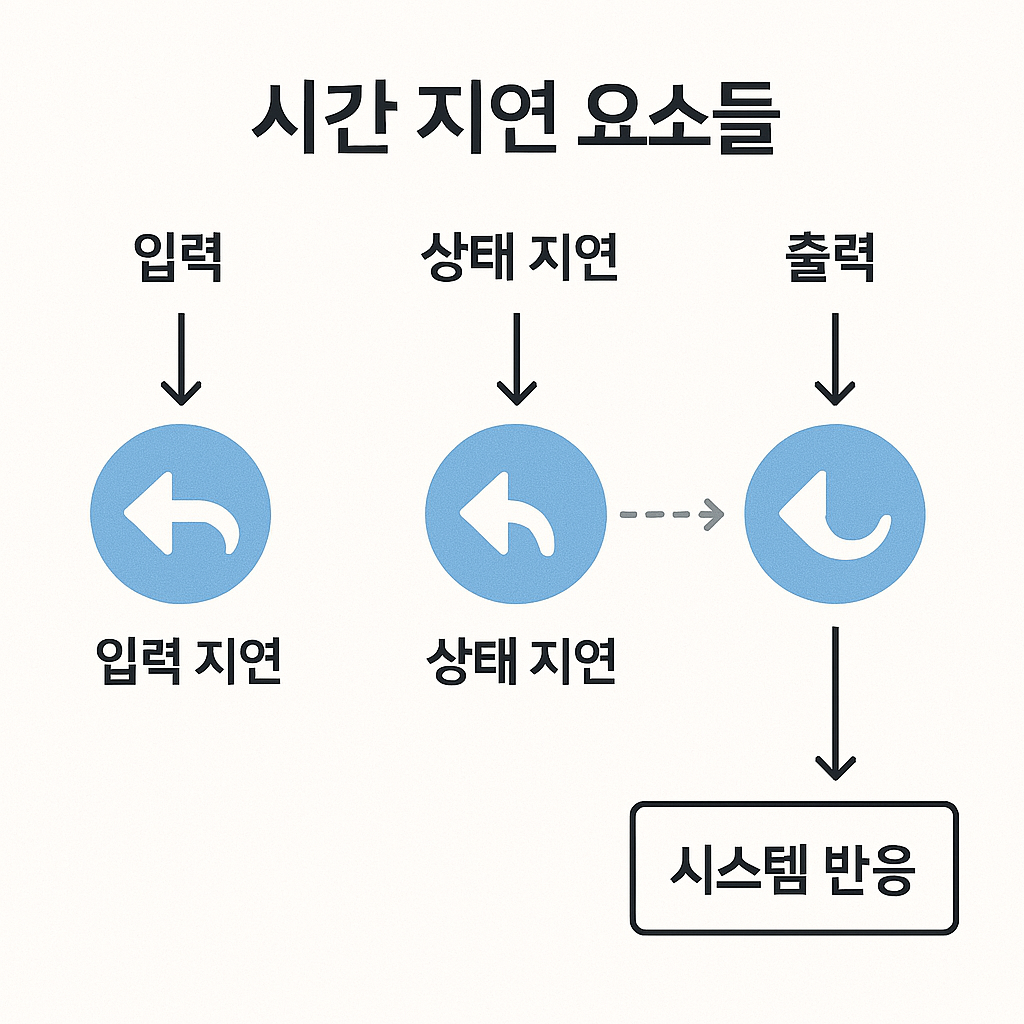
논문에서는 총 세 가지 시간 지연을 고려해
- 상태 지연 h(t) : 과거의 상태가 현재에 영향을 미치는 시간 간격
- 입력 지연 r(t) : 입력 신호가 실제 시스템에 반영되기까지 걸리는 시간
- 출력 지연 τ(t) : 내부 연산의 결과가 외부로 드러나기까지의 지연
이런 시간 지연은 현실 시스템에서 흔히 발생해. 예를 들어 네트워크 지연, 센서 반응 시간, 제어신호 처리 시간 등이 이에 해당해. 이 지연들이 제대로 제어되지 않으면, 시스템은 불안정해지고 오작동하게 돼.
3. 확률성과 불확실성: 예측 불가능한 현실 대응
현실 시스템은 항상 예측 가능한 건 아니지. 기계가 노후되거나, 외부 환경이 급격하게 변하거나, 센서에서 에러가 발생하기도 해. 이런 불확실성 요소들이 시스템의 안정성에 영향을 줘.
논문에서는 이를 다음과 같이 분류해
- 결정론적 계수 : 고정된 값 (예: 연결 가중치 A, B 등)
- 불확실한 계수 : 시간에 따라 변할 수 있는 오차 포함 값 (예: ΔA, ΔB)
그리고 여기에 확률적 노이즈 ω(t)까지 포함되면, 시스템은 단순하지 않게 돼. 이처럼 복잡한 환경에서 시스템이 안정성을 유지할 수 있는 조건을 찾는 게 이 논문의 핵심이야.
4. 수학적으로 안정성을 어떻게 증명할까?
시스템 방정식 구성
연구에서 사용한 모델은 다음과 같은 확률 미분 방정식으로 구성돼
d[x(t) - D·x(t - h(t))] = [-C·x(t) + A·f(x(t)) + B·f(x(t - r(t)))]dt
+ [H1·x(t) + H2·x(t - τ(t))]dω(t)
여기서
- D : 지연 상태의 영향
- A, B : 연결 가중치 행렬
- f(x) : 활성화 함수 (비선형 함수)
- H1, H2 : 확률적 외란에 대한 민감도
- ω(t) : 백색 잡음(white noise)
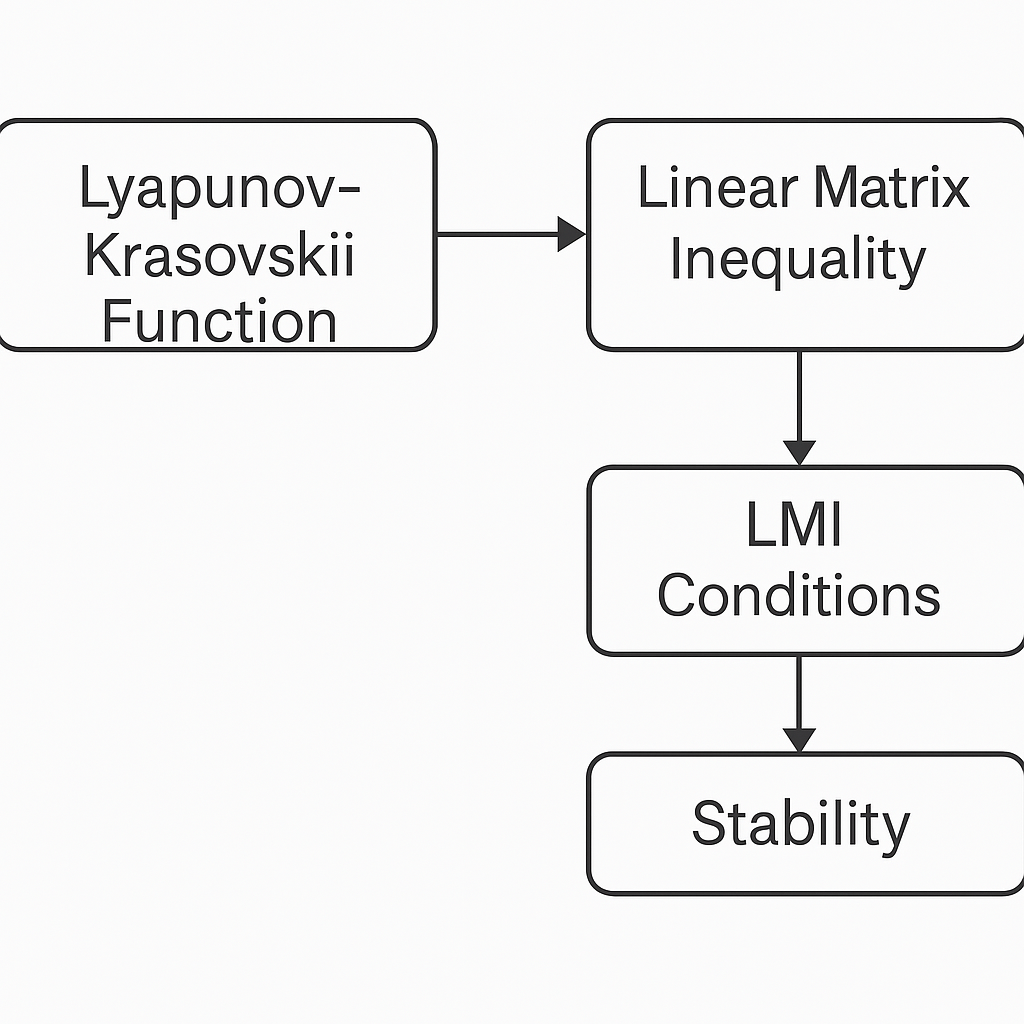
Lyapunov-Krasovskii 함수와 LMI 적용
이 복잡한 방정식을 안정적으로 해석하기 위해 사용한 도구가 바로:
- Lyapunov-Krasovskii 함수 : 시스템의 안정성을 판단하는 에너지 함수
- LMI (선형 행렬 부등식) : 수치적 조건을 만족시키는 해 찾기
이 방법의 장점은 수치 계산이 가능하다는 것. MATLAB LMI Toolbox로 실제로 안정성을 확인할 수 있어.
5. 두 가지 안정성 기준 : 글로벌 안정성과 강건 안정성
확률적 중립 신경망이 안정하다고 말하려면, 단순히 ‘잘 작동한다’는 느낌만으로는 부족해. 수학적으로 명확한 안정성 기준을 만족해야 해. 논문에서는 이를 크게 두 가지로 구분했어.
글로벌 평균 제곱 안정성과 글로벌 강건 평균 제곱 안정성이야.
글로벌 평균 제곱 안정성 (Global Mean-Square Stability)
이건 아주 기본적인 안정성 조건이야. 쉽게 말하면, 시간이 충분히 지나면 시스템의 상태(출력)가 점점 작아져서 결국엔 거의 0에 가까워진다는 뜻이야.
즉, 아무리 초기 조건이 다양하더라도 결과가 자연스럽게 수렴해 가는 거지.
수식으로는 이렇게 표현돼
- lim_{t to infty} mathbb{E}[|x(t)|^2] = 0 ]
여기서 Emathbb{E}E는 기대값(평균), x(t)x(t)x(t)는 시간 ttt일 때의 시스템 상태야.
쉽게 말해, ‘잡음이나 방해가 없다면, 시스템은 알아서 제자리로 돌아간다’는 개념이야.
글로벌 강건 평균 제곱 안정성 (Global Robust Mean-Square Stability)
여기서는 더 나아가서, 잡음이나 계수의 불확실성, 즉 현실에서 발생할 수 있는 모든 예측 불가능한 요소들까지 고려해. 그리고 이런 복잡한 상황에서도 여전히 시스템이 안정적으로 작동하면, 그걸 강건(stable + robust)하다고 해.
쉽게 말하면,
“외부에서 누가 계속 방해를 해도, 시스템이 멘탈 무너지지 않고 끝까지 버티는 상태!
”
논문에서는 이를 위해 파라미터의 변화, 확률적 노이즈, 시간 지연 등 여러 복합 요인을 포함한 복잡한 수식을 LMI로 정리해서, 어떤 조건일 때 이 강건 안정성이 보장되는지를 수학적으로 증명했어.
6. 예제로 보는 실제 검증 과정
논문에서는 실제로 2차원 신경망 모델을 구성해서 위 조건을 만족하는지 확인했어. 주요 매트릭스들은 다음과 같아:
A = [[-0.5, 0.2], [0.4, -0.1]]
B = [[0.1, -1.0], [-1.4, 0.4]]
C = [[1.15, 0], [0, 1.2]]
D = [[0.35, 0.2], [0, 0.6]]
활성화 함수는 리미트가 정해진 Sigmoid 타입으로, 아래 조건을 만족하도록 설정했지
li ≤ (fi(u) - fi(v)) / (u - v) ≤ li+
그리고 이 모델에 대해 LMI 조건을 만족하는 행렬들을 도출해냈어. MATLAB Toolbox를 통해 다음과 같은 결과를 얻었지.
- 시스템은 전역적으로 안정적이다.
- 확률적 외란 및 파라미터 불확실성이 존재해도 무너지지 않는다.
7. 실무 적용 가능성은?
이 연구 결과는 단순한 수학적 성과에 그치지 않고, 다양한 실무 영역에 적용할 수 있어.
| 적용 분야 | 활용 사례 설명 |
| 로봇 제어 | 다양한 지연과 외란 속에서도 정확하게 동작하도록 제어 설계 |
| 자율주행차 | 센서 정보 지연 및 GPS 오류에도 차량 주행 안정성 확보 |
| 스마트 팩토리 | 네트워크 지연과 불확실한 센서 환경에서의 설비 제어 |
| 뇌-컴퓨터 인터페이스 | 뇌파 처리 지연과 잡음을 고려한 인터페이스 설계 |
8. 요약 정리
- 확률적 중립 신경망은 지연과 외란을 동시에 고려한 신경망 모델
- 지연 함수, 불확실 계수, 확률 외란을 모두 포함
- Lyapunov-Krasovskii 함수 + LMI 조건으로 안정성 수학적으로 분석
- MATLAB을 이용해 수치적 검증이 가능
- 실무 시스템에 바로 적용 가능한 조건을 제시
9. 마무리하며
이번 논문은 AI 시스템의 신뢰성을 높이기 위한 이론적 기반을 제공해줘. 단순히 예쁜 결과를 내는 것보다, 시스템이 얼마나 불안정성에 강한지를 아는 것이 정말 중요한 시대야. 특히 우리가 점점 더 현실 시스템과 연결되는 AI를 만들고 있으니까.
불확실성, 지연, 노이즈 속에서도 안정적으로 동작하는 AI를 설계하고 싶다면, 이 논문에서 제시한 확률적 중립 신경망 안정성 분석법을 꼭 참고해보자.